


Особенности настройки и эксплуатации
гироскопа Robbe 3-D Gyro
Автор статьи Дмитрий Деригин г.Киев
Heading Hold, (Heading Lock)-это особый режим работы гироскопа при котором достигается абсолютная стабилизация хвостового ротора модели.
При нейтральном положении ручки управления хвостовым, ротором модель остаётся в точно заданном направлении по курсу, не реагируя на ветер или другие аэродинамические нагрузки.
При действии ручкой управления, гироскоп регулирует вращение модели вокруг оси главного ротора пропорционально отклонению ручки.
Это даёт возможность
опытным пилотам выполнять сложные фигуры 3-D пилотажа, которые раньше были вообще невозможны. При статических фигурах пилот (особо важно для начинающих
моделистов) может концентрировать всё внимание только на трёх функциях управления моделью.(прим.ред.)
 Я использую гироскопы 3-Д Гиро на моделях вертолетов около 2-х лет. Могу сказать, что это надежный, простой в эксплуатации и настройке гироскоп для любительских и спортивных моделей.
Его достаточно высокие технические характеристики а так же приемлемая цена обусловили большую популярность у моделистов.
Я использую гироскопы 3-Д Гиро на моделях вертолетов около 2-х лет. Могу сказать, что это надежный, простой в эксплуатации и настройке гироскоп для любительских и спортивных моделей.
Его достаточно высокие технические характеристики а так же приемлемая цена обусловили большую популярность у моделистов.Мне хотелось бы поделится собственным опытом эксплуатации 3-Д Гиро.
Гироскоп Robbe 3-D Gyro
Гироскоп 3-Д Гиро - это пьезо-гироскоп со стандартным режимом работы и режимом удержания направления (Heading Hold, Head Lock, AVSC). При покупке гироскопа нужно помнить о том, что нормально работать он будет только с "быстрым" хвостовым серво (например - Futaba S9203). Так же, немаловажно, чтобы привод хвостового ротора был жестким (с помощью трубчатого вала или армированного зубчатого ремня).

Так выглядит плата электроники гироскопа 3D-Gyro
Конструктивно гироскоп состоит из одного блока-корпуса с отходящим от него тремя проводами подключения
Установка и статическая регулировка.
Установка гироскопа на модель производится точно в соответствие с инструкцией. Настройка гироскопа так же производится в соответствие с инструкцией и следующими рекомендациями:
1. Включить передатчик и сделать следующие установки:
- отработки (ATV) 4-го канала (курс) уменьшить симметрично до 70% в каждую сторону;
- шаг тиммера 4-го канала установить минимальный (возможно только на аппаратуре с электронным триммером);
- отаботки 5-го дискретного канала (управление чувствительностью гироскопа) уменьшить симметрично до 70% в каждую сторону. При использовании передатчика с 5-м пропорциональным каналом, сдвинуть движок управления на 70% в любую из сторон;
- отключить все микшеры (функция REVO) и кривые 4-го канала.
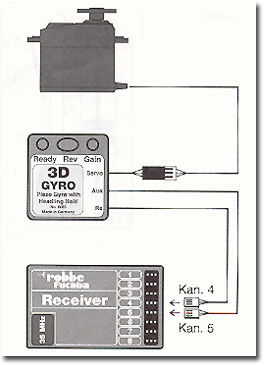
Схема подключения гироскопа к приемнику
2. Подключить гироскоп к приемнику (4-й канал-курс, 5-й канал-чувсвительность гироскопа) и серво. Отсоединить тягу шага хвоста от рычага серво.
3. Включить передатчик, включить приемник. Приемник (бортовое питание) включать аккуратно, не дергая и не двигая модель 12-15 секунд после включения, пока не установиться пьезо-датчик
и не загорится красный светодиод на гироскопе. Так делать всегда.
4. При включении гироскопа рычаг серво сместиться и останется неподвижным, если тумблер (движок) 5-го канала находится в режиме "стандартный".Если же тумблер (движок) 5-го канала находится
в режиме "удержание направления", то после включения гироскопа рычаг серво сместится и начнет медленно дрейфовать в одну из сторон. Этот дрейф необходимо минимизировать триммером 4-го канала.
5. Установить тумблер (движок) 5-го канала в "стандартный" режим. Снять (открутить) рычаг серво хвоста и установить его на серво в среднее (симметричное) положение. Подсоединить к этому
рычагу тягу шага хвоста. Шарики и наконечники шарниров тяги шага хвоста должны соединяться плотно, без люфтов. Подвигать ручку 4-го канала и убедится что управление хвостовым ротором
производится правильно (нос модели в полете должен поворачивать в ту же сторону, что и ручка). В противном случае в передатчике необходимо включить реверс 4-го канала. Подвигать модель
за хвостовую балку и убедиться что гироскоп работает в правильном направлении (воздействие гироскопа на шаг хвостового ротора должно быть противодействующим смещению). В противном случае
надо выключить гироскоп, переключить на нем тумблер реверса и снова включить бортовое питание.
6. Изменяя длину тяги шага хвоста установить постоянный шаг хвостовых лопастей около 6-10 градусов (при сложенных в одну сторону лопастях "ножницы" составят около 2см.). Постоянный шаг
хвостовых лопастей должен быть установлен так, чтобы при работе хвостовой ротор противодействовал вращающему моменту модели.
7. Подвигать ручку курса (4-й канал) в обе стороны до упора, при этом втулка шага хвоста должна двигаться по хвостовому валу не доходя до крайних точек (упоров, ограничителей) на 1-2 мм.
и ни во что не упираться. Такой ход втулки шага регулируется длиной (плечем) рычага серво. Отработки (ATV) 4-го канала не трогать.
8. Включить 5-й канал в режим "удержания направления". Подвигать хвостовую балку модели. Шаг хвостового ротора должен изменяться как и в п.5. При этом если остановить движение хвостовой балки,
то втулка шага хвоста остановится в одном из крайних положений, а затем медленно начнет дрейфовать в одну из сторон.

Вариант монтажа гироскопа на модели.
Корпус гироскопа приклеен к модели мягкой микропористой
двухсторонней липкой прокладкой
Динамическая регулировка.
Динамическая (полетная) регулировка производиться на летном поле в штиль или слабый ветер.
1. Включить "стандартный" режим. Взлететь на модели и зависнуть на уровне глаз. Заметить в каком направлениии смещается хвост модели. Посадить модель. Изменяя длину тяги хвоста отрегулировать
постоянный шаг так, чтобы хвост при висении не смещался. Триммер хвоста не трогать. Сделать несколько взлетов и посадок.
2. Взлететь на высоту 5-10м. Сделать несколько резких пируэтов вправо и влево. Отработками 5-го канала или положением его движка отрегулировать чувствительность гироскопа и добиться четкой
остановки модели после окончания фигуры. Сделать несколько горизонтальных пролетов на максимальной скорости. При заносах хвоста в полете следует увеличить чувствительность, а при колебаниях
(подергиваниях) хвоста - чувствительность уменьшить.
3. Включить режим "удержания направления". Повторить регулировки п.2. При этом следует обратить внимание, что в режиме "удержания направления" хвостовая балка будет сохранять то положение,
которое ей задала ручка 4-го канала до возвращения в нейтраль. Курсовая самостабилизация модели при горизонтальном полете происходить не будет. Если нос четко не установить по курсу, то модель
будет лететь немного боком.
4. Если не удается с помощью регулировки чувствительности полностью избавится от колебаний хвоста или его смещений, необходимо изменить длину хвостовых лопастей (подбирается эксперементально).
У меня на 10 куб.см. моделях чувствительность гироскопа составляет обычно 50-60% для каждого режима, длина лопастей 105-110 мм.
Использование режимов гироскопа.
Режимы "стандартный" и "удержания направления" каждый использует основываясь на собственном опыте и привычках. При соревнованиях по классу FAI F3C, режим "удержания направления" я использую для статических фигур и динамической фигуры "отстрел". В остальном я летаю в "стандартном" режиме. В соревнованиях по 3-Д пилотажу, обычно все фигуры производятся в режиме "удержания направления".
Деригин Д.В. Киев, 9.01.03.
ФОРУМ
RC HELICOPTERS © Design Style 2003 Designet by Victor Chodejew Ukraine, Nikolaew |